import torch
import torch.nn as nn
import torch.optim as optim ![]()
Свёрточные сети (CNN)

Recap: регуляризация
Dropout
do = nn.Dropout(p=0.5)
doTrueDropout(p=0.5, inplace=False)t = torch.arange(0, 15, dtype=torch.float32).reshape(3, 5)
ttensor([[ 0., 1., 2., 3., 4.],
[ 5., 6., 7., 8., 9.],
[10., 11., 12., 13., 14.]])do.train()
print("training", do.training)
do(t)tensor([[ 0., 0., 0., 6., 0.],
[ 0., 12., 0., 0., 18.],
[ 0., 0., 24., 26., 28.]])do.eval()
print("training", do.training)
do(t)FalseOptimizers
- SGD — самый простой вариант оптимизатора, не хранит статистики по параметрам.
- Adam — хранит сразу 2 статистики на каждый параметр нейросети (первый и второй момент). Благодаря этому быстрее сходится, но занимает доп. место на видеокарте.
from torchvision.models import resnet18
import torch.optim as optim
import torch
resnet = resnet18(pretrained=True)/usr/local/lib/python3.10/dist-packages/torchvision/models/_utils.py:208: UserWarning: The parameter 'pretrained' is deprecated since 0.13 and may be removed in the future, please use 'weights' instead.
warnings.warn(
/usr/local/lib/python3.10/dist-packages/torchvision/models/_utils.py:223: UserWarning: Arguments other than a weight enum or `None` for 'weights' are deprecated since 0.13 and may be removed in the future. The current behavior is equivalent to passing `weights=ResNet18_Weights.IMAGENET1K_V1`. You can also use `weights=ResNet18_Weights.DEFAULT` to get the most up-to-date weights.
warnings.warn(msg)
Downloading: "https://download.pytorch.org/models/resnet18-f37072fd.pth" to /root/.cache/torch/hub/checkpoints/resnet18-f37072fd.pth
100%|██████████| 44.7M/44.7M [00:00<00:00, 149MB/s]sum(p.numel() for p in resnet.parameters() if p.requires_grad) * 4 / 1024/102444.591949462890625resnet = resnet.to('cuda')!nvidia-smiSat Feb 10 14:04:51 2024
+---------------------------------------------------------------------------------------+
| NVIDIA-SMI 535.104.05 Driver Version: 535.104.05 CUDA Version: 12.2 |
|-----------------------------------------+----------------------+----------------------+
| GPU Name Persistence-M | Bus-Id Disp.A | Volatile Uncorr. ECC |
| Fan Temp Perf Pwr:Usage/Cap | Memory-Usage | GPU-Util Compute M. |
| | | MIG M. |
|=========================================+======================+======================|
| 0 Tesla T4 Off | 00000000:00:04.0 Off | 0 |
| N/A 63C P0 30W / 70W | 167MiB / 15360MiB | 2% Default |
| | | N/A |
+-----------------------------------------+----------------------+----------------------+
+---------------------------------------------------------------------------------------+
| Processes: |
| GPU GI CI PID Type Process name GPU Memory |
| ID ID Usage |
|=======================================================================================|
+---------------------------------------------------------------------------------------+❓ Вопрос: Почему столько памяти выделилось?
Если перенести на CUDA один скаляр — torch.tensor([1.0]).to('cuda') — в мониторе видеопамяти (например, nvidia-smi) видно, что аллоцируется порядка 100 MB. Сам тензор занимает считаные байты. Куда расходуется остальная память?
Ответ
Основная часть памяти уходит на контекст CUDA (CUDA context), который создаётся при первом обращении к GPU из процесса:
- загрузка и инициализация драйвера и CUDA runtime;
- кэши ядер (JIT-компиляция при первом вызове операций);
- внутренние структуры менеджера памяти (allocator), пулы и страницы — PyTorch/CUDA резервируют блоки памяти для последующих аллокаций, чтобы уменьшить число обращений к драйверу;
- служебные буферы и структуры для работы с устройством.
Сам тензор занимает минимум (например, 4 байта для одного float). Оставшиеся ~100 MB — это «стартовый» контекст GPU в этом процессе; дальше аллокации идут уже поверх него и не добавляют такой разовой нагрузки.
# Пример: один скаляр на GPU — малый тензор, но видна аллокация контекста
import torch
torch.cuda.reset_peak_memory_stats()
x = torch.tensor([1.0]).to("cuda")
allocated_mb = torch.cuda.memory_allocated() / (1024**2)
print(f"Аллоцировано после .to('cuda'): {allocated_mb:.1f} MB")
print(f"Размер тензора в байтах: {x.element_size() * x.numel()}")Adam
adam = optim.Adam(resnet.parameters(), lr=3e-4)
out = resnet(torch.rand(1, 3, 224, 224).to('cuda'))
loss = out.mean()
loss.backward()
adam.step()!nvidia-smiSat Feb 10 14:04:59 2024
+---------------------------------------------------------------------------------------+
| NVIDIA-SMI 535.104.05 Driver Version: 535.104.05 CUDA Version: 12.2 |
|-----------------------------------------+----------------------+----------------------+
| GPU Name Persistence-M | Bus-Id Disp.A | Volatile Uncorr. ECC |
| Fan Temp Perf Pwr:Usage/Cap | Memory-Usage | GPU-Util Compute M. |
| | | MIG M. |
|=========================================+======================+======================|
| 0 Tesla T4 Off | 00000000:00:04.0 Off | 0 |
| N/A 63C P0 30W / 70W | 423MiB / 15360MiB | 0% Default |
| | | N/A |
+-----------------------------------------+----------------------+----------------------+
+---------------------------------------------------------------------------------------+
| Processes: |
| GPU GI CI PID Type Process name GPU Memory |
| ID ID Usage |
|=======================================================================================|
+---------------------------------------------------------------------------------------+SGD
Потребляет меньше видеопамяти (ноль), т.к. не хранит моменты по градиентам.
sgd = optim.SGD(resnet.parameters(), lr=3e-4)
out = resnet.forward(torch.rand(1, 3, 224, 224).to('cuda'))
loss = out.mean()
loss.backward()
sgd.step()!nvidia-smiSat Feb 10 14:05:25 2024
+---------------------------------------------------------------------------------------+
| NVIDIA-SMI 535.104.05 Driver Version: 535.104.05 CUDA Version: 12.2 |
|-----------------------------------------+----------------------+----------------------+
| GPU Name Persistence-M | Bus-Id Disp.A | Volatile Uncorr. ECC |
| Fan Temp Perf Pwr:Usage/Cap | Memory-Usage | GPU-Util Compute M. |
| | | MIG M. |
|=========================================+======================+======================|
| 0 Tesla T4 Off | 00000000:00:04.0 Off | 0 |
| N/A 60C P0 30W / 70W | 459MiB / 15360MiB | 6% Default |
| | | N/A |
+-----------------------------------------+----------------------+----------------------+
+---------------------------------------------------------------------------------------+
| Processes: |
| GPU GI CI PID Type Process name GPU Memory |
| ID ID Usage |
|=======================================================================================|
+---------------------------------------------------------------------------------------+❓ Вопрос: Почему потребляется сильно больше видеопамяти, чем занимает модель и состояние оптимизатора? На что ещё расходуется видеопамять?
BatchNorm2d
Поучительный факт: исходное объяснение из статьи (2015) оказалось неверным, но метод работает отлично.
Оригинальная гипотеза (опровергнута): авторы считали, что BatchNorm уменьшает Internal Covariate Shift.
Но How Does Batch Normalization Help Optimization? показали: при искусственном увеличении ICS сети с BN всё равно обучаются хорошо; у сетей с BN измеренный ICS больше, чем без BN. Уменьшение ICS не причина успеха.
Почему реально работает:
- Сглаживание loss landscape (главная причина) — функция потерь становится более гладкой и выпуклой, градиенты предсказуемее → можно использовать больший learning rate.
- Устойчивость к плохой инициализации — нормализация смягчает влияние неудачной инициализации весов.
- Неявная регуляризация — mean и std считаются по батчу и меняются от батча к батчу → в обучение вносится шум, работающий как регуляризация.
Internal Covariate Shift
Слой 1 обновляет веса →
меняется распределение его выхода →
Слой 2 видит новое распределение →
приходится "переучиваться" →
замедляет обучениеaffine_bn = nn.BatchNorm2d(3, affine=True)
affine_bn.eval()
affine_bn.train()
affine_bnBatchNorm2d(3, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)affine_bn.train()
affine_bn.trainingTrueaffine_bn.eval()
affine_bn.trainingFalselist(affine_bn.parameters())[Parameter containing:
tensor([1., 1., 1.], requires_grad=True), Parameter containing:
tensor([0., 0., 0.], requires_grad=True)]not_affine_bn = nn.BatchNorm2d(3, affine=False )
not_affine_bnBatchNorm2d(3, eps=1e-05, momentum=0.1, affine=False, track_running_stats=True)list(not_affine_bn.parameters())[]Что происходит под капотом?
# очень грубо!
# важно, что средние значения и дисперсия считаются для каждого слоя отдельно
# в этом примере это не так
def forward(self, data: torch.Tensor, eps=1e-5):
data = (data - data.mean()) / data.std()
# data = data * self.affine_std + self.affine_mean
return datat = torch.arange(0, 45, dtype=torch.float32).view(1, 3, 3, 5)
t.shapetorch.Size([1, 3, 3, 5])t_bn = not_affine_bn(t)
t_bn.shapetorch.Size([1, 3, 3, 5])t_bntensor([[[[-1.6202e+00, -1.3887e+00, -1.1573e+00, -9.2582e-01, -6.9436e-01],
[-4.6291e-01, -2.3145e-01, 0.0000e+00, 2.3145e-01, 4.6291e-01],
[ 6.9436e-01, 9.2582e-01, 1.1573e+00, 1.3887e+00, 1.6202e+00]],
[[-1.6202e+00, -1.3887e+00, -1.1573e+00, -9.2582e-01, -6.9437e-01],
[-4.6291e-01, -2.3146e-01, -2.3842e-07, 2.3145e-01, 4.6291e-01],
[ 6.9436e-01, 9.2582e-01, 1.1573e+00, 1.3887e+00, 1.6202e+00]],
[[-1.6202e+00, -1.3887e+00, -1.1573e+00, -9.2582e-01, -6.9437e-01],
[-4.6291e-01, -2.3146e-01, -3.5763e-07, 2.3145e-01, 4.6291e-01],
[ 6.9436e-01, 9.2582e-01, 1.1573e+00, 1.3887e+00, 1.6202e+00]]]])(t - t.mean()) / t.std()tensor([[[[-1.6751, -1.5989, -1.5228, -1.4466, -1.3705],
[-1.2944, -1.2182, -1.1421, -1.0659, -0.9898],
[-0.9137, -0.8375, -0.7614, -0.6852, -0.6091]],
[[-0.5330, -0.4568, -0.3807, -0.3046, -0.2284],
[-0.1523, -0.0761, 0.0000, 0.0761, 0.1523],
[ 0.2284, 0.3046, 0.3807, 0.4568, 0.5330]],
[[ 0.6091, 0.6852, 0.7614, 0.8375, 0.9137],
[ 0.9898, 1.0659, 1.1421, 1.2182, 1.2944],
[ 1.3705, 1.4466, 1.5228, 1.5989, 1.6751]]]])# еще есть параметр track_running_stats, про него можно подробнее посмотреть в домашке
bn_track_running_stats = nn.BatchNorm2d(3, affine=True, track_running_stats=True)
# means by channel, vars by channel, count steps
list(bn_track_running_stats.buffers())[tensor([0., 0., 0.]), tensor([1., 1., 1.]), tensor(0)]Работа с изображениями
❓ Вопрос: Что хранится в значении пикселя? (число от 0 до 255)
❓ Вопрос: Что если все цвета 255?
❓ Вопрос: Что если все цвета 0?
❓ Вопрос: Что если red = 255, а green = blue = 0?
❓ Вопрос: Что если все каналы равны друг другу?
[ 1, 64, 64 ] # черно-белая
[ 3, 64, 64 ] # цветная картинка[3, 64, 64]!wget https://i.imgflip.com/62ixgw.jpg--2025-02-10 16:44:22-- https://i.imgflip.com/62ixgw.jpg
Resolving i.imgflip.com (i.imgflip.com)... 104.16.40.101, 104.16.71.101
Connecting to i.imgflip.com (i.imgflip.com)|104.16.40.101|:443... connected.
HTTP request sent, awaiting response... 200 OK
Length: 69445 (68K) [image/jpeg]
Saving to: ‘62ixgw.jpg’
62ixgw.jpg 100%[===================>] 67.82K --.-KB/s in 0.008s
2025-02-10 16:44:22 (8.08 MB/s) - ‘62ixgw.jpg’ saved [69445/69445]
RGB-каналы
У изображений обычно 3 канала. Мы будем работать с RGB-каналами.
Значение каждого пикселя [0..255] — это его яркость.
import cv2
import matplotlib.pyplot as plt
img_bgr = cv2.imread("./62ixgw.jpg")
img_rgb = cv2.cvtColor(img_bgr, cv2.COLOR_BGR2RGB)
img_rgb.shape(433, 577, 3)img_rgb[:3, :3, :]array([[[155, 181, 204],
[157, 183, 206],
[160, 186, 209]],
[[145, 171, 194],
[151, 177, 200],
[158, 184, 207]],
[[136, 162, 185],
[140, 166, 189],
[145, 171, 194]]], dtype=uint8)plt.imshow(img_bgr)
plt.imshow(img_rgb)
for i in range(3):
plt.figure(i)
img_copy = img_rgb.copy()
img_copy[:, :, (i + 1) % 3] = 0
img_copy[:, :, (i + 2) % 3] = 0
plt.imshow(img_copy)


Свертки
Inductive Bias
| Аспект | MLP | CNN |
|---|---|---|
| Inductive Bias | ❌ Нет | ✅ Локальность + эквивариантность |
| Связность | 🌐 Все со всеми | 🔍 Локальные окна |
| Параметры 32x32 pix | 💥 ~150M | ✨ ~27K |
| Разделение весов | ❌ Нет | ✅ Да |
| Структура изображения | 🤷 Игнорирует | 🎯 Учитывает |
| Инвариантность к сдвигу | ❌ Нет | ✅ Да |
| Receptive field | 👁️ Сразу глобальный | 📈 Растёт по слоям |
| На малых данных | 📉 Переобучается | 📊 Генерализует |
| Для фото | 🚫 Плохо | 🏆 Отлично |
Conv2d
Документация: Conv2d
- kernel_size — размер ядра свертки (так ядро иногда называют фильтром). На гифке размер ядра 3 на 3. Можно сделать несимметричную свертку (например, 1 на 10), но на практике используют симметричные
- padding — отступ, ширина “рамочки”, котрая будет дорисовываться вокруг нашего изображения
- stride — размер шага ядра

❓ Вопрос: Где на этой анимации ядро свертки?
Ответ
Ядро – это серый квадратик (3x3), который бегает по синему квадратику. Зеленый квадратик – это результат работы свертки.Визуализация свертки
Забегая вперед, это визуализация: nn.Conv2d(1, 1, kernel_size=3, stride=2, padding=1, dilation=1)
Результаты свертки каждого скользящего окна складываются
Как свертки работают для цветного изображения?
Го в гифку https://cs231n.github.io/convolutional-networks/
The visualization below iterates over the output activations (green), and shows that each element is computed by elementwise multiplying the highlighted input (blue) with the filter (red), summing it up, and then offsetting the result by the bias
Попробуем применить свертку к изображению
[0, 0, 0],
[0, 1, 0],
[0, 0, 0]Б)
[0, 1, 0],
[0, -2, 0],
[0, 1, 0]В)
[0, 0, 0],
[1, -2, 1],
[0, 0, 0]Г)
[0, 1, 0],
[1, -4, 1],
[0, 1, 0]Д)
[0, -1, 0],
[-1, 5, -1],
[0, -1, 0]Е)
[0.0625, 0.125, 0.0625],
[0.125, 0.25, 0.125],
[0.0625, 0.125, 0.0625]!wget https://www.hse.ru/data/2021/08/25/1414838109/3HSE-8086_Preview.jpeg -O hse.jpeg--2023-02-06 13:42:33-- https://www.hse.ru/data/2021/08/25/1414838109/3HSE-8086_Preview.jpeg
Resolving www.hse.ru (www.hse.ru)... 178.248.234.104
Connecting to www.hse.ru (www.hse.ru)|178.248.234.104|:443... connected.
HTTP request sent, awaiting response... 200 OK
Length: 59741 (58K) [image/jpeg]
Saving to: ‘hse.jpeg’
hse.jpeg 100%[===================>] 58.34K --.-KB/s in 0.1s
2023-02-06 13:42:35 (457 KB/s) - ‘hse.jpeg’ saved [59741/59741]
import cv2
import matplotlib.pyplot as plt
img = cv2.imread("./hse.jpeg")
RGB_img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
plt.figure(figsize=(12, 8))
plt.imshow(RGB_img)
plt.show()
import torch
import torch.nn as nn
from torch.nn import functional as F
img_t = torch.from_numpy(RGB_img).type(torch.float32).unsqueeze(0)
kernel = torch.tensor([
[0, 0, 0],
[0, 1, 0],
[0, 0, 0]
]).reshape(1, 1, 3, 3).type(torch.float32)
# out, in, kernel_width, kernel_height
kernel = kernel.repeat(3, 3, 1, 1) # result kernel size is [ 3, 3, 3, 3 ]
img_t = img_t.permute(0, 3, 1, 2) # [BS, H, W, C] -> [BS, C, H, W]
img_t = nn.ReflectionPad2d(1)(img_t) # Pad Image for same output size
result = F.conv2d(img_t, kernel)[0] #result.shapetorch.Size([3, 532, 800])plt.figure(figsize=(12, 8))
result_np = result.permute(1, 2, 0).numpy() / 256 / 3
plt.imshow(result_np[:, :, :])
plt.show()
❓ Вопрос: Почему изображение потеряло цвет?
Ответ
Для каждого пикселя каждого слоя свертка берет усредненный цвет по всем слоям.
Свертки в PyTorch
Тренировочный цикл (FashionMNIST)
Копипаста с предыдущего семинара — ничего нового.
from torchvision.datasets import FashionMNIST
import matplotlib.pyplot as plt
import torch.nn as nn
import numpy as np
from torchvision.transforms import ToTensor
from torch.optim import Adam
# ничего нового, копипаста с предыдущего сема
class FMNISTImageSet:
def __init__(self, train=True, transform=None):
self.data = FashionMNIST("./tmp", train=train, download=True)
self.transform = transform
def __len__(self):
return len(self.data)
def __getitem__(self, item):
# сделайте одноканальную картинку [1, 28, 28] с float32
sample, label = self.data[item]
if self.transform is not None:
sample = self.transform(sample)
else:
sample = np.array(sample, dtype=np.float32)[None:, ...] / 255
return dict(
sample=sample,
label=label,
)
fmnist_train = FMNISTImageSet(train=True, transform=ToTensor())
fmnist_val = FMNISTImageSet(train=False, transform=ToTensor())from copy import deepcopy
from tqdm.auto import tqdm
import numpy as np
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.utils.data import Dataset, DataLoader
from torch.utils.tensorboard import SummaryWriter
from torchvision.datasets import FashionMNIST
import matplotlib.pyplot as plt
import torch.nn as nn
import numpy as np
from torchvision.transforms import ToTensor
from torch.optim import Adam
class Trainer:
def __init__(self, model: nn.Module, optimizer,
train_dataset: Dataset, val_dataset: Dataset,
tboard_log_dir: str = './tboard_logs/', batch_size: int = 128):
self.model = model
self.optimizer = optimizer
self.train_dataset = train_dataset
self.val_dataset = val_dataset
self.batch_size = batch_size
self.device = 'cpu'
if torch.cuda.is_available():
self.device = torch.cuda.current_device()
self.model = self.model.to(self.device)
self.global_step = 0
self.log_writer = SummaryWriter(log_dir=tboard_log_dir)
def save_checkpoint(self, path):
torch.save(self.model.state_dict(), path)
def train(self, num_epochs: int):
model = self.model
optimizer = self.optimizer
train_loader = DataLoader(self.train_dataset, shuffle=True, pin_memory=True, batch_size=self.batch_size)
val_loader = DataLoader(self.val_dataset, shuffle=False, pin_memory=True, batch_size=self.batch_size)
best_loss = float('inf')
for epoch in range(num_epochs):
model.train()
for batch in tqdm(train_loader):
batch = {k: v.to(self.device) for k, v in batch.items()}
loss, details = model.compute_all(batch)
optimizer.zero_grad()
loss.backward()
optimizer.step()
for k, v in details.items():
self.log_writer.add_scalar(k + "/train", v, global_step=self.global_step)
self.global_step += 1
with torch.no_grad():
model.eval()
val_losses = []
for batch in tqdm(val_loader):
batch = {k: v.to(self.device) for k, v in batch.items()}
loss, details = model.compute_all(batch)
for k, v in details.items():
self.log_writer.add_scalar(k + '/validation', v, global_step=self.global_step)
val_losses.append(loss.item())
val_loss = np.mean(val_losses)
if val_loss < best_loss:
self.save_checkpoint("./best_checkpoint.pth")
best_loss = val_lossCNNModel
class CNNModel(nn.Module):
def __init__(self):
super().__init__()
self.inner = nn.Sequential(
# input ~ [ bs, 1, w, h ]
# параметры ядра и паддинг специально стараемся подбирать такими,
# чтобы не изменялись пространственные размерности картинки
nn.Conv2d(1, 8, kernel_size=3, padding=1), # [ bs, 8, w, h ]
nn.ReLU(),
nn.Conv2d(8, 4, kernel_size=3, padding=1), # [ bs, 4, w, h ]
nn.ReLU(),
nn.Flatten(1), # [ bs, 4 * w * h ]
nn.Linear(4 * 28 * 28, 10), # [ bs, 10 ]
)
def forward(self, x):
return self.inner(x)
def compute_all(self, batch): # удобно сделать функцию, в которой вычисляется лосс по пришедшему батчу
x = batch['sample'] # [ bs, 1, w, h ]
y = batch['label']
x = x.unsqueeze(1)
# print(x.shape)
logits = self.inner(x) # [ bs, 10 ]
assert logits.size() == torch.Size([ x.size(0), 10 ]), f"logits size is wrong: {logits.size}"
loss = F.cross_entropy(logits, y)
acc = (logits.argmax(axis=1) == y).float().mean().cpu().numpy()
metrics = dict(acc=acc)
return loss, metrics
# проверяйте работоспособность сразу
cnn_model = CNNModel()
cnn_opt = optim.SGD(cnn_model.parameters(), lr=1e-2)
cnn_trainset = FMNISTImageSet(train=True)
cnn_valset = FMNISTImageSet(train=False)
cnn_trainer = Trainer(cnn_model, cnn_opt, cnn_trainset, cnn_valset, batch_size=128)cnn_trainer.train(3)100%|██████████| 469/469 [00:20<00:00, 22.57it/s]
100%|██████████| 79/79 [00:01<00:00, 61.50it/s]
100%|██████████| 469/469 [00:15<00:00, 30.10it/s]
100%|██████████| 79/79 [00:01<00:00, 60.28it/s]
100%|██████████| 469/469 [00:14<00:00, 31.83it/s]
100%|██████████| 79/79 [00:01<00:00, 61.00it/s]Сравнение MLP vs CNN
class MLPModel(nn.Module):
def __init__(self):
super().__init__()
self.inner = nn.Sequential(
nn.Linear(784, 100),
nn.ReLU(),
nn.Linear(100, 10),
)
def forward(self, x):
return self.inner(x)
def compute_all(self, batch): # удобно сделать функцию, в которой вычисляется лосс по пришедшему батчу
x = batch['sample']
y = batch['label']
logits = self.inner(x)
loss = F.cross_entropy(logits, y)
acc = (logits.argmax(axis=1) == y).float().mean().cpu().numpy()
metrics = dict(acc=acc)
return loss, metrics
model = MLPModel()sum( p.numel() for p in model.parameters() if p.requires_grad)79510sum( p.numel() for p in cnn_model.parameters() if p.requires_grad)23829Pooling и рецептивное поле
Pooling
It is common to periodically insert a Pooling layer in-between successive Conv layers in a ConvNet architecture. Its function is to progressively reduce the spatial size of the representation to reduce the amount of parameters and computation in the network, and hence to also control overfitting.
https://cs231n.github.io/convolutional-networks/#pool

!wget https://i.imgflip.com/658r4d.jpg--2023-02-06 13:53:26-- https://i.imgflip.com/658r4d.jpg
Resolving i.imgflip.com (i.imgflip.com)... 104.18.64.15, 104.18.255.14
Connecting to i.imgflip.com (i.imgflip.com)|104.18.64.15|:443... connected.
HTTP request sent, awaiting response... 200 OK
Length: 39502 (39K) [image/jpeg]
Saving to: ‘658r4d.jpg’
658r4d.jpg 100%[===================>] 38.58K --.-KB/s in 0.002s
2023-02-06 13:53:26 (17.7 MB/s) - ‘658r4d.jpg’ saved [39502/39502]
import cv2
import matplotlib.pyplot as plt
image = cv2.imread("658r4d.jpg")
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.imshow(image)
maxpool = nn.MaxPool2d(7)
maxpoolMaxPool2d(kernel_size=7, stride=7, padding=0, dilation=1, ceil_mode=False)Обучаемые параметры? Нет
list(maxpool.parameters())[]Применение пулинга к изображению
image_t = torch.tensor(image, dtype=float)
image_t.shapetorch.Size([433, 577, 3])polled_image_t = maxpool(image_t.unsqueeze(0).transpose(3, 1)).transpose(3, 1)[0, ...]
polled_image_t.shapetorch.Size([61, 82, 3])plt.imshow(polled_image_t.numpy().astype(int))
❓ Вопрос: Куда пропали черные границы на картинке? Почему?
Ответ
Черный пиксель - это нулевая яркость (нулевое значение) по всем каналам. Поэтому соседний пиксель любого другого цвета будет замещать черные пиксели.
Global Pooling
# [ bs, 3, 225, 224 ]
# [ bs, 512, 17, 17 ]
# Linear(512 * 16 * 16, 10)# разные пространственные размерности!
# [ bs, 512, 8, 8 ] + flatten(1) = [ bs, 512, 8, 8 ]
# [ bs, 512, 17, 17 ] + flatten(1) = [ bs, 512 * 17 * 17 ]# AvgPooling
# [ bs, 512, 17, 17 ] -> [ bs, 512, 1, 1 ] -> [ bs, 512 * 1 * 1 ]
# Linear(512, 10)avg_pool = nn.AdaptiveAvgPool2d((2, 2))
avg_poolAdaptiveAvgPool2d(output_size=(1, 1))list(avg_pool.parameters())[]bs = 3
filters_cnt = 128
dimx = 64
dimy = 64
filters = torch.rand((bs, filters_cnt, dimx, dimy))
avg_pool(filters).shapetorch.Size([3, 128, 1, 1])Рецептивное поле

TorchVision Models
Residual Block, ResNet

class ResBlock(nn.Module):
def __init__(self, in_dim, hidden_dim):
super().__init__()
"""
in_dim --- размерность слоев на входе (используется в nn.Conv2d)
hidden_dim --- скрытая размерность слоев (используется в nn.Conv2d)
"""
self.model = nn.Sequential(
nn.Linear( 3, 3, kernel_size=3),
nn.ReLU(),
nn.Linear( 3, 3, kernel_size=3),
nn.ReLU(),
)
return
def forward(self, x):
f_x = self.model(x)
return f_x + xfrom torchvision.models import resnet18
import torch.optim as optim
import torch
resnet = resnet18(pretrained=True) # pretrained=True
resnetResNet(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer2): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(64, 128, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer3): Sequential(
(0): BasicBlock(
(conv1): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(128, 256, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer4): Sequential(
(0): BasicBlock(
(conv1): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))
(fc): Linear(in_features=512, out_features=1000, bias=True)
)Как применить существующую модель к моей задаче?
Fine tuning
from torchvision.models import resnet18
import torch.nn as nn
resnet = resnet18(pretrained=True)
prev_in_features = resnet.fc.in_features
resnet.fc = nn.Linear(prev_in_features, 10)resnetResNet(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer2): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(64, 128, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer3): Sequential(
(0): BasicBlock(
(conv1): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(128, 256, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer4): Sequential(
(0): BasicBlock(
(conv1): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))
(fc): Linear(in_features=512, out_features=10, bias=True)
)Что дальше?
Стоит постепенно размораживать веса модели. Если начать учить end2end, могут испортиться ядра сверток, так как от нового слоя потекут плохие градиенты, потому что он инициализирован рандомно.
# замораживаем веса для backbone'а сети
for p in resnet.parameters():
p.requires_grad = False
# размораживаем наш классификатор
for p in resnet.fc.parameters():
p.requires_grad = True
# for p in resnet.layer4.parameters():
# p.requires_grad = Truesum(p.numel() for p in resnet.parameters() if p.requires_grad)5130Мега Блиц!
❓ Вопрос: Зачем нужен параметр affine в BatchNorm?
Ответ
BN нормализует входной батч. Но может оказаться, что нейросети нужно какое-то смещение или какой-то std. Поэтому в этом слое создаются обучаемые параметры, которые так же вносят вклад в градиент. Чтобы если что, сеть могла выучить необходимое смещение.
❓ Вопрос: В каком месте нужно располагать слой BatchNorm внутри Residual блоков?
nn.Conv2d(...) -> nn.BatchNorm2d() -> nn.ReLU()nn.BatchNorm2d() -> nn.ReLU() -> nn.Conv2d(...)nn.Conv2d(...) -> nn.ReLU() -> nn.BatchNorm2d()Ответ
- ✅ Первый вариант — это база, используем по умолчанию
- 👌 Второй допустим для глубоких слоев
- ❌ BatchNorm пытается нормализовать уже искаженное распределение, теряется много информации, cтатистики BN могут быть нестабильными
❓ Вопрос: Можно ли использовать после слоя Dropout BatchNorm?
Ответ
Скорее всего, полностью процесс обучения это не сломает. Но более логично было бы сначала применить BatchNorm, потом Dropout.
❓ Вопрос: Зачем нужен transform= в классе датасета? Когда его нужно применять?
Ответ
В этот параметр передаётся функция для предобработки изображения: преобразует PIL Image или numpy.array в тензор, нормализует пиксели (делит на 255). Самый простой вариант — ToTensor.
Ещё с помощью этого метода можно сделать аугментацию: Resize, RandomHorizontalFlip, RandomRotation.
С помощью аугментаций расширяем обучающую выборку без ручного сбора данных, что часто повышает качество сети.
❓ Вопрос: Какие основные параметры у свертки?
Ответ
Обучаемые параметры: in/out + kernel_size — одна матрица размерности [in, out, kernel_size[0], kernel_size[1]].
Параметры, влияющие на вычисление свертки: padding, stride.
❓ Вопрос: Сколько параметров будет у свертки nn.Conv2d(3, 3, kernel_size=3)?
Ответ
Форма весов: [3, 3, 3, 3], kernel_size=3 означает (3, 3). Число параметров: 3×3×3×3 + bias = 84.
❓ Вопрос: Для того, чтобы свертка с ядром 3×3 не изменяла пространственную размерность изображения при stride=1, мы используем padding=1. Какое значение padding нужно использовать для ядра 5×5 и stride=1?
Ответ
padding=2
❓ Вопрос: Как вы думаете, какие ядра выучивают реальные нейросетки на настоящих картинках?
Ответ
Принято считать, что фильтры выучивают текстуры. Этим можно обмануть классификатор (например, рыба с текстурой чешуи как кожа коровы — классификатор может решить, что это корова).
Ядра можно визуализировать: deeplizard.com, 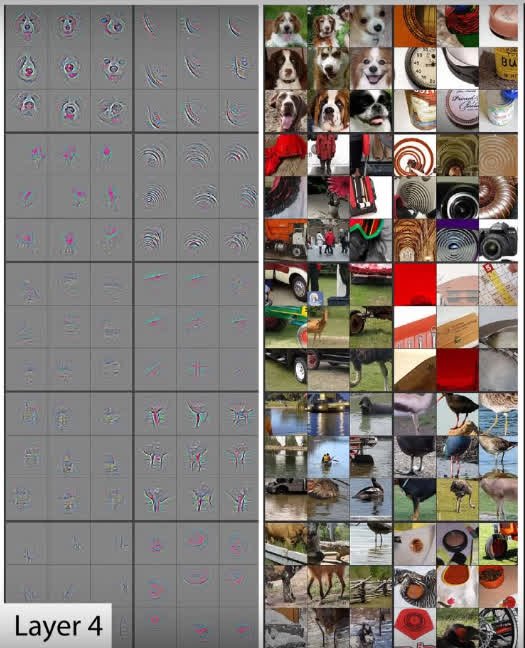 .
.
❓ Вопрос: В начале сема есть 6 сверток, пронумерованные буквами. Сопоставьте ядра действию, которое делает это ядро:
Размытие
Увеличение резкости
Тождественное преобразование
Выделение вертикальных границ
Выделение горизонтальных границ
Выделение границ
Ответ
A — 3, Б — 4, В — 5, Г — 6, Д — 1, Е — 2.
❓ Вопрос: Какой размерности свертка и какие у неё параметры в cs231?
Гифка: https://cs231n.github.io/convolutional-networks/
The visualization below iterates over the output activations (green), and shows that each element is computed by elementwise multiplying the highlighted input (blue) with the filter (red), summing it up, and then offsetting the result by the bias
Conv2d(?, ?, kernel_size=?, padding=?, stride?)Ответ
Conv2d(3, 2, kernel_size=3, padding=1, stride=2)
❓ Вопрос: После применения свертки к изображению мы получили 10 фильтров. За счёт чего мы получаем разные значения в этих фильтрах?
Ответ
У каждого из 10 выходных каналов своё ядро (свой набор весов). Одна и та же область входа умножается на разные ядра, поэтому в разных фильтрах получаются разные значения. Иными словами, разные значения — за счёт разных обучаемых параметров у каждого фильтра.

❓ Вопрос: Какое рецептивное поле у одной ячейки выходного тензора сверточной сети, состоящей из двух подряд идущих сверток 3×3 (stride=1)?
nn.Sequential(
nn.Conv2d(in, out_1, kernel_size=3),
# ...
nn.Conv2d(out_1, out_2, kernel_size=3),
)Другими словами: какое количество пикселей вложили свои значения в один “пиксель” итогового фильтра (feature-map’ки это одно и то же)?
Ответ
Ответ: 5×5=25. Рецептивное поле одного пикселя первого фильтра 3×3. Квадратик 3×3 этого фильтра соответствует одному “пикселю” второго фильтра и квадратику 5×5 исходного изображения.
❓ Вопрос: Чем Pooling отличается от Adaptive Global Pooling?
Ответ
Global Pooling действует по всей пространственной размерности картинки. Выход — тензор [bs, channels, 1, 1].
Обычный Pooling уменьшает пространственную размерность изображения/фильтра и увеличивает рецептивное поле последующих нейронов.
❓ Вопрос: Зачем мы хотим увеличить рецептивное поле на более глубоких слоях?
Ответ
В задаче классификации последним идёт Linear по последней фича-мапе. Linear не учитывает расположение пикселей и их «соседство». Значения последнего фильтра могут нести эту информацию; чем больше рецептивное поле, тем больше информации можно сохранить в последнем фильтре.
❓ Вопрос: Как определяется порядок слоёв и размерности скрытых состояний в MLP или количество фильтров в CNN?
Ответ
Это гиперпараметры модели: их задают вручную или подбирают (grid search, перебор, опыт). В MLP — число нейронов в каждом скрытом слое и их порядок; в CNN — число фильтров в каждом блоке, глубина, использование BatchNorm и т.д. Универсальной формулы нет, часто опираются на известные архитектуры (ResNet, VGG) и масштабируют под задачу.
❓ Вопрос: Что делает .detach?
Ответ
Отключает тензор от графа вычислений: при вызове .backward() градиенты через этот тензор не проходят. Значения и устройство не меняются, но граф обрывается. Нужно, когда надо использовать значение в вычислениях, но не обучать ту часть модели, откуда оно пришло (например, целевые значения в регрессии или фиксированный учитель).
❓ Вопрос: Что делает .to('cuda')?
Ответ
Переносит тензор или модуль на GPU (устройство CUDA). По умолчанию тензоры создаются на CPU; для ускорения обучения и инференса их и модель переносят на видеокарту. Можно также использовать .to('cpu') для переноса обратно на процессор.
❓ Вопрос: Что будет в результате работы этого сниппета?
ones_cuda = torch.ones([ 10 ]).to('cuda')
torch.zeros([ 10 ]) + ones_cudaБудет ли это быстрее, чем если убрать .to('cuda')
ones_cuda = torch.ones([ 10 ])
torch.zeros([ 10 ]) + ones_cudaОтвет
Результат — тензор из единиц длины 10. torch.zeros([10]) создаётся на CPU, ones_cuda — на GPU; при сложении PyTorch перенесёт CPU-тензор на GPU (или выполнит операцию там, где удобнее), результат будет на GPU.
Для такого маленького тензора разница по скорости незаметна; накладные расходы на копирование CPU→GPU могут даже сделать вариант с .to('cuda') чуть медленнее. Выигрыш от GPU проявляется на больших тензорах и больших моделях.
Домашки
- pytorch-basics
- batchnorm
